Tools
Hardware: Leap Motion, Arduino, Laser
Software: Websocket, Serial
Technische Grundlagen
1.Semester
Konzept
EchoGrip basiert auf der Idee, menschliche Bewegungen intuitiv auf eine Maschine zu übertragen, um die Interaktion zwischen Mensch und Technik zu veranschaulichen.
Der Ursprung der Idee liegt in potenziellen Anwendungen wie der Fernsteuerung in gefährlichen Umgebungen, der Rehabilitation oder kreativen Prozessen wie Kunst und Design. Das ursprüngliche Ziel von EchoGrip war es, sich mit den Grundlagen der Mechatronik sowie Arduino vertraut zu machen.
EchoGrip
Prozess
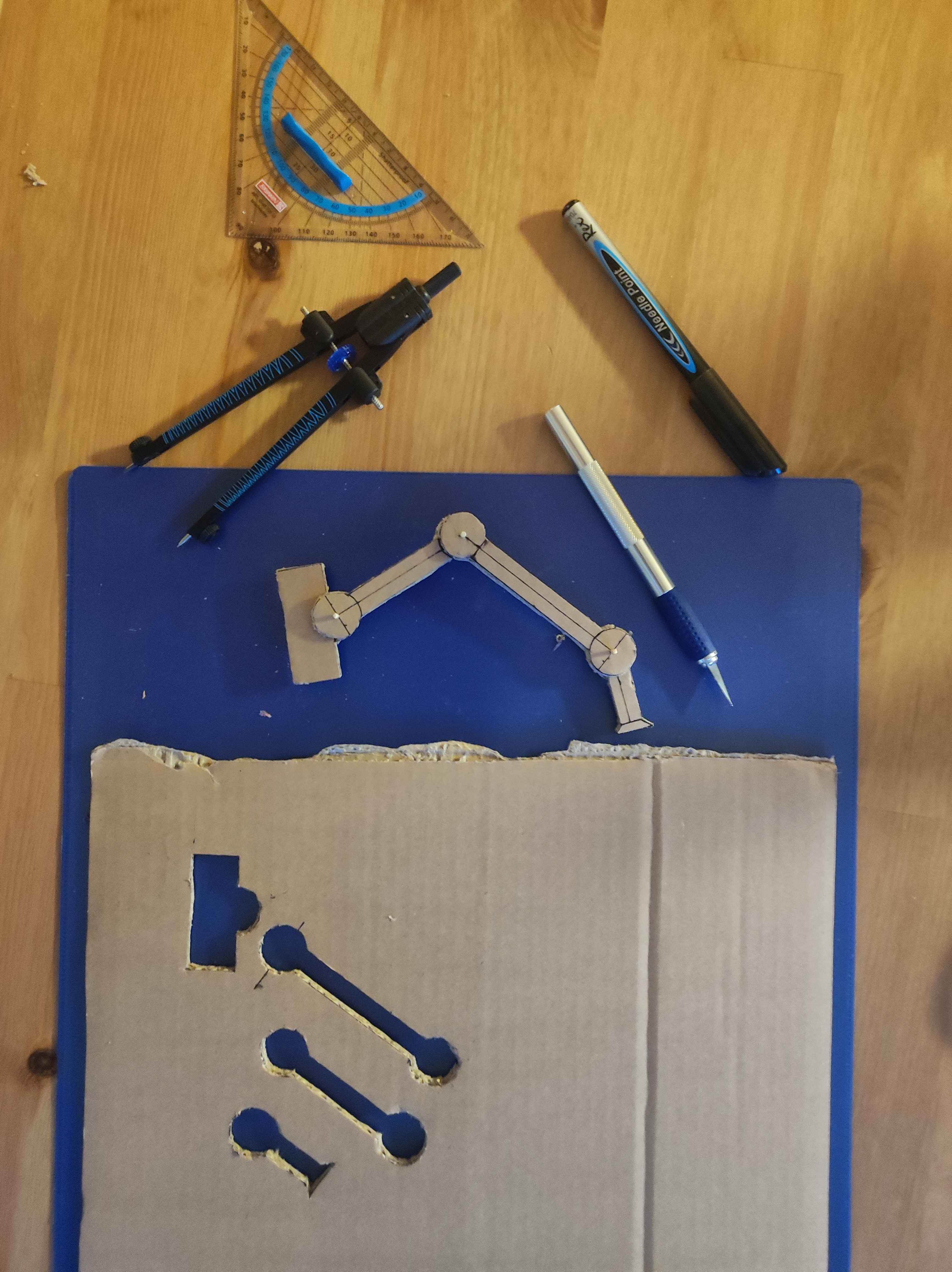
Der Prozess begann mit einem Papierprototyp, um eine Vorstellung davon zu bekommen, wie sich die verschiedenen Winkel ändern würden und wie die Berechnungen ungefähr aussehen sollten.
Anschließend wurde eine einfache Website programmiert, die korrekte Triangulationen basierend auf Mausbewegungen durchführte, um die zugrunde liegenden Berechnungen zu testen und zu entwickeln. Danach wurden die Leap Motion-Entwicklungskits in die Website integriert, sodass Leap Motion als Controller für den Roboterarm genutzt werden konnte.
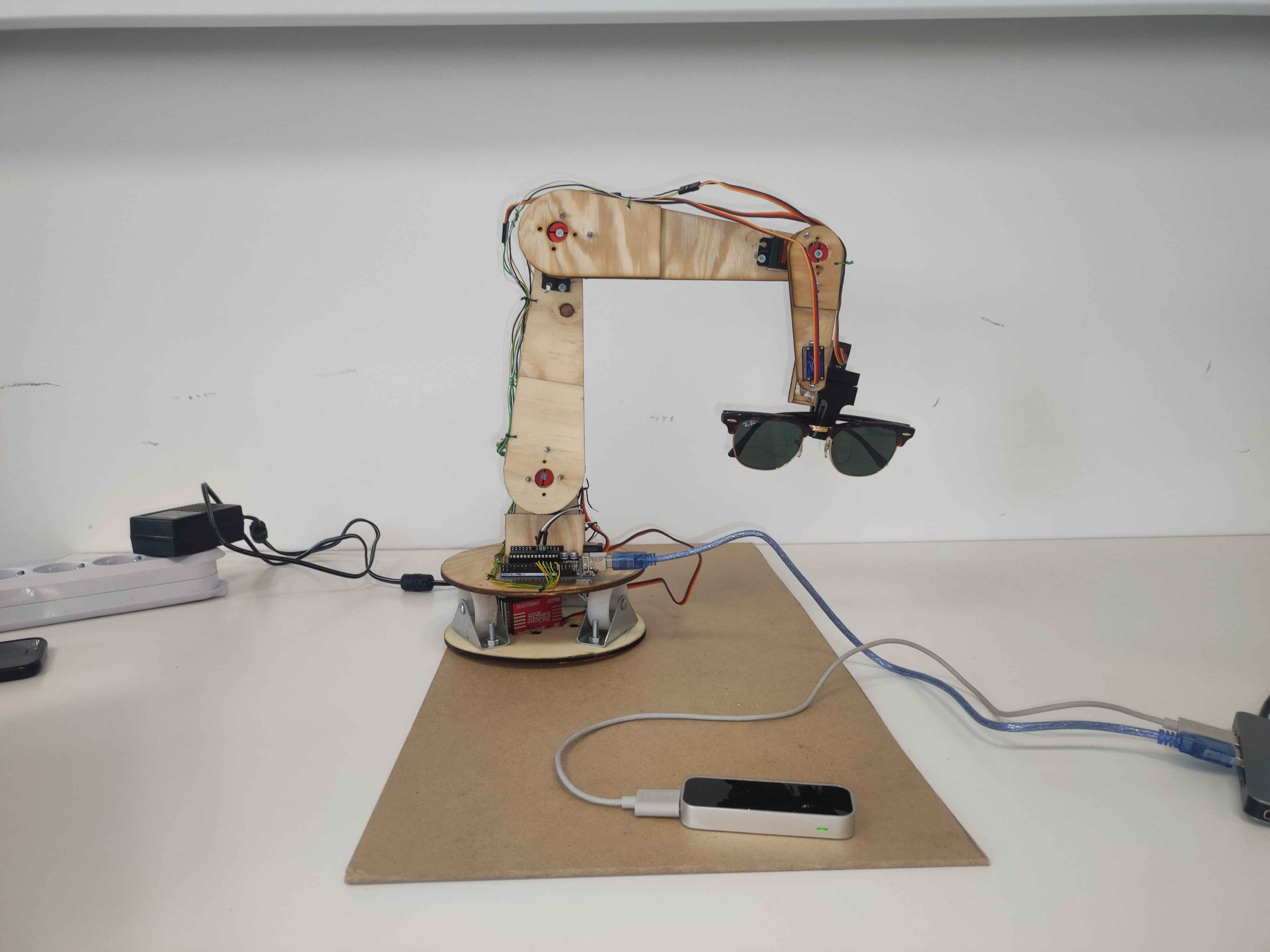
Schließlich musste der Arm selbst gebaut werden – hierfür wurde Holz verwendet, das präzise mit einem Laser geformt wurde. Anschließend wurden Servos in den Arm eingebaut, die die berechneten Winkel über WebSockets und Serial über das Arduino empfingen.
Konzept - Erster Prototyp
Ergebniss
Das Ergebnis war eine Umgebung, bestehend aus der Leap Motion, einem PC und dem Arduino mit dem angeschlossenen Arm. Die Leap Motion erfasste die Bewegungsdaten und leitete sie an den PC weiter, der die Berechnungen durchführte und die Ergebnisse an den Arduino sendete, welcher sie anschließend ausführte.
Das fertige Projekt, EchoGrip, ahmte die Bewegungen des Nutzers mit minimaler Verzögerung nach. Bewegungen wurden in allen drei Achsen umgesetzt, ebenso wie das Greifen verschiedener Objekte mit einer vom Nutzer bestimmten, anpassbaren Kraft.
Für Ausstellungszwecke wurde zusätzlich ein Timer integriert, der den Arm nach der letzten Nutzung automatisch in eine Standardposition zurückführte.
EchoGrip